Hi. Sorry for bumping such an old thread, hope it is ok, but I thought it best here as it follows on from my original post. Although this might end up being a bit niche, so apologies in advance.
Since I posted about making my first bat, I have spent the last 12 months reading every (yes, really!) thread on bat making, figured out how to carry out structural modelling of bats, and generally feeding an unhealthy obsession with bat making.
Sticking to the original post, where the design of the bat I made was based on artificial intelligence anybody can now access the full Masters thesis where the method is described in loads of detail:
https://open.library.ubc.ca/soa/cIRcle/collections/ubctheses/24/items/1.0392675I got in touch with the author, who was very kind and helped me out in recreating part of his work. Long story short, I managed to run his (slightly modified) code in Ansys, an engineering simulation software package. The result is that I can use it to predict quite a few things of interest for bats of almost any shape, like mass and volume, centres of mass and percussion, location of vibration nodes, etc
My main interest is in seeing how the different shapes of bats change these parameters, concentrating on their effect on things that most people are familiar with, like pickup and sweetspot.
The modelling is not perfect, as the shape of the back of the bat is estimated from 50 points. Overall this is actually pretty good at recreating most shapes, but if there is some feature that is a bit small in one direction (looking at you Dynadrive) then it can be missed. Those 50 points are meshed together, along with edges, toe, face and handle, in Ansys for the modelling, allowing you to come up with ridiculous shapes like this
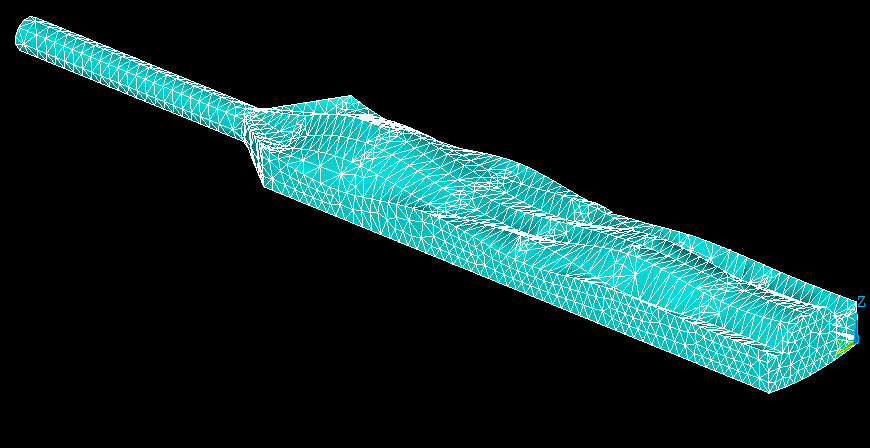 free photo upload
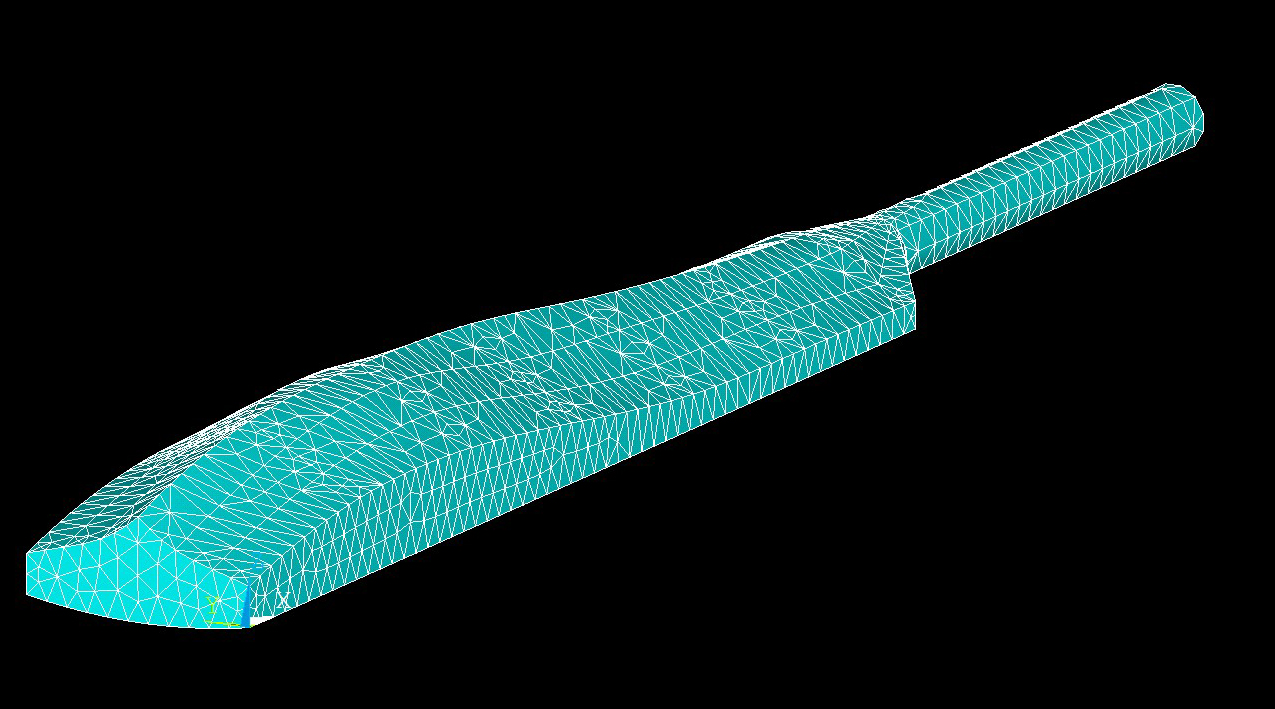
free photo uploadYou then carry out the structural analysis, which means you can deform the bat like this:
 image share
image shareBack to the original bat. I have used it twice, and it feels ok. There is a nice butterfly stain running pretty much across the middle, which might help things a little. Here are a few photos to remind you of the slightly odd shape, taken after I learnt how to polish bats a bit better.



The bat weighs 2 lbs 10.8 oz in real life, and looks like it should have a low sweetspot. The modelling does a pretty good job in this case, with the predicted weight being 2 lbs 11.5 oz (I did not play around with the modelled density, just used a constant one, so could improve), and the shape matching the real one quite nicely.
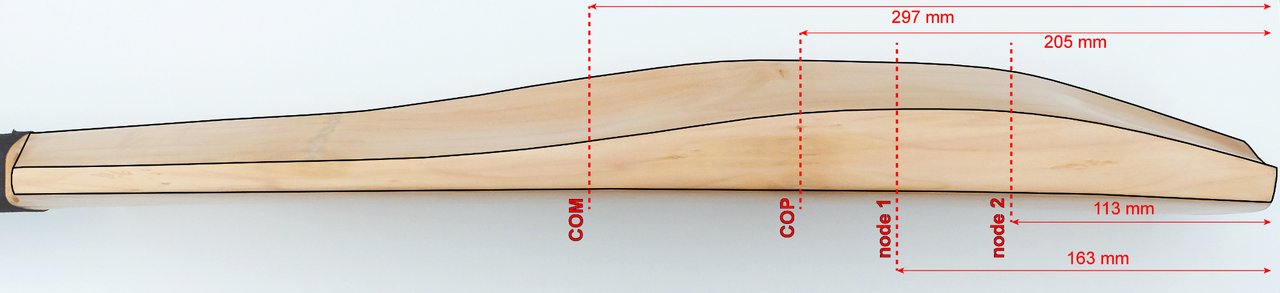
So trying to show some of the results on the bat itself, with COM = centre of mass, COP = centre of percussion, node 1 and node 2 = nodal points (of interest) for 1st and 2nd vibration modes. I think the definition of these have been covered a lot on this forum, but just in case
the COP is where the batter will feel no recoil of the bat, instead just a perfect rotation about the pivot point between the two hands. The nodal points are locations where the bat will not vibrate, instead transmitting more energy into the ball. The sweetspot is often defined as an area consisting of some combination of these points. In the thesis (page 48), an objective function is defined, that basically looks at how close together these 3 points are the lower the value, the better the middle, at least according to that work. The centre of mass will, to a large extent, help define the pickup of the bat (i.e. the higher the centre of mass, the better the pickup will feel).
I marked the location of these features on my bat, to see how they compare with the shape, and the results are what you expect: the sweetspot defined by this method is pretty much where there is the most wood. It is still satisfying to see where exactly I should be aiming for (not that I often manage to!)
To me, I would say that this bat has a low middle, and the pickup feels a bit heavier than I would normally like. Which makes me interested in how the values compare with different bat shapes. So I went off and analysed some bats and have got way more results than people could probably ever care about!
But some of the more interesting things, at least to me
Reassuringly, the overall weight of the bat does not seem to have much of an effect on where the middle or centre of mass are. Of course, the mass will affect the ball speed, but that also comes down to bat speed etc., and I want to focus on just the bat performance itself. At the risk of alienating everybody, Ive made some graphs
apologies in advance.
In the top graph below, Ive plotted mass against objective function. Lower objective function means those 3 points (COP, node 1, node 2) are closer together.
In the bottom graph below, Ive plotted mass against the centre of mass location. Higher COM value means pickup might feel better.
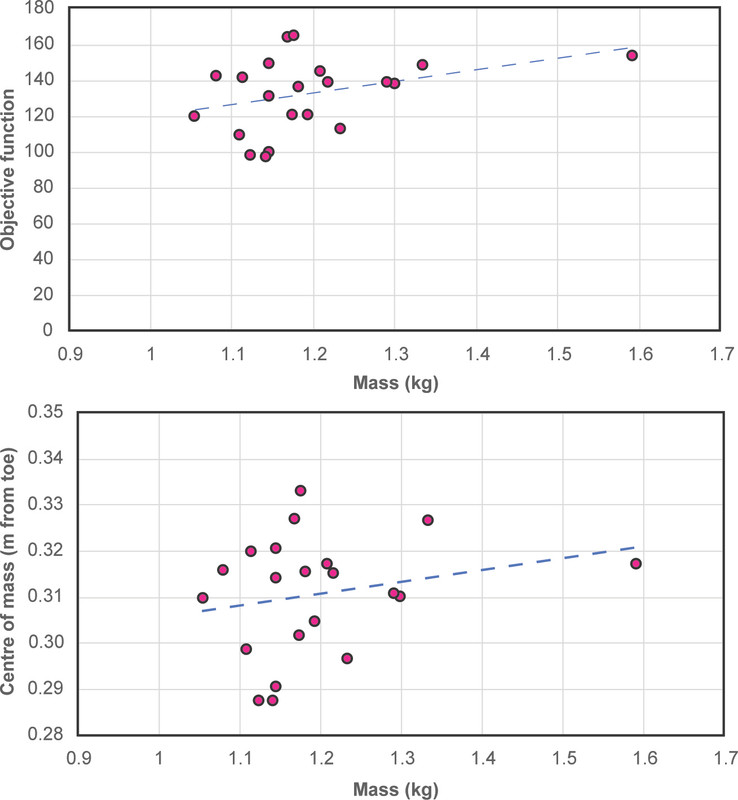
So what I think this means is that we are not constrained just by weight in how a bat can perform. But instead, the shape of the back can have a real (hopefully noticeable) difference.
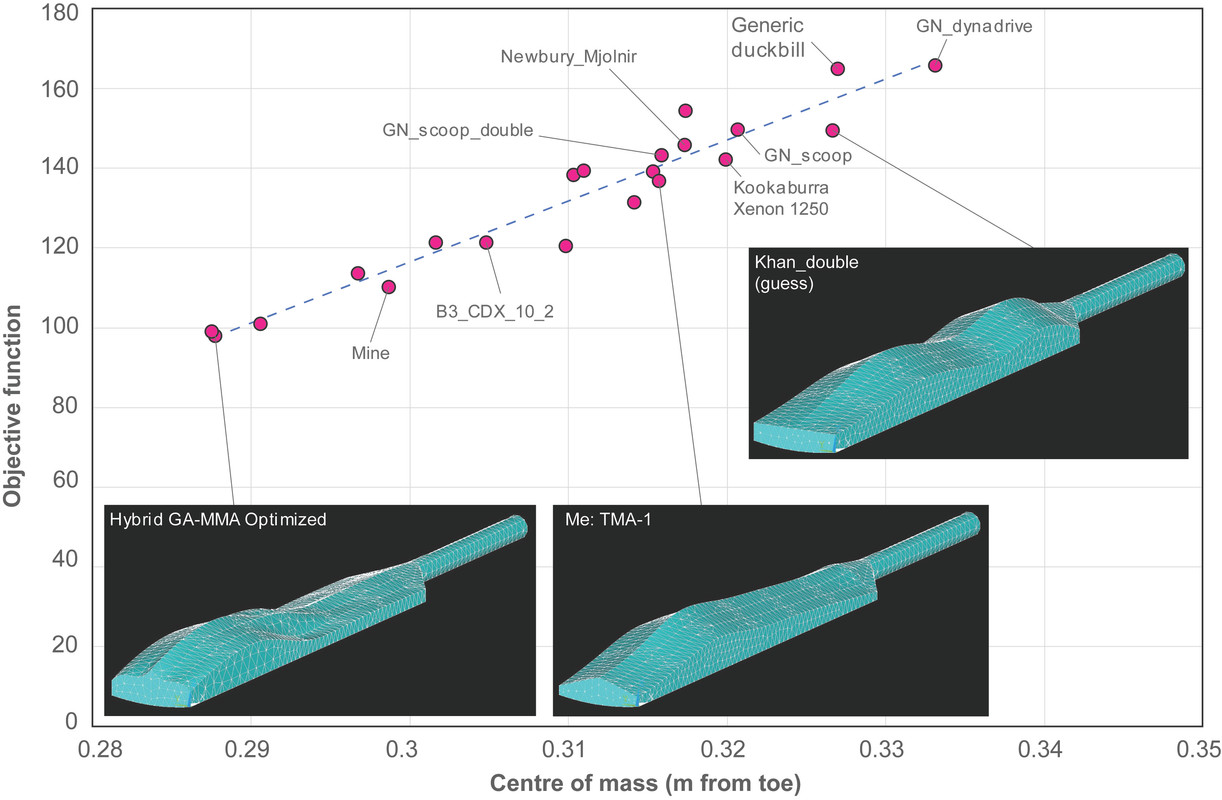
Exploring this idea a bit further, below Ive plotted the COM (pickup) against objective function (size of middle) for the same bats as in the above plots. What we can now see is an apparent relationship: the higher the centre of mass, the higher (poorer) the objective function. Those bats that fall below the straight line could be said to have a better middle (according to this definition) without sacrificing pickup. So Ive named a few of the bats, and given pictures for the more weird ones.
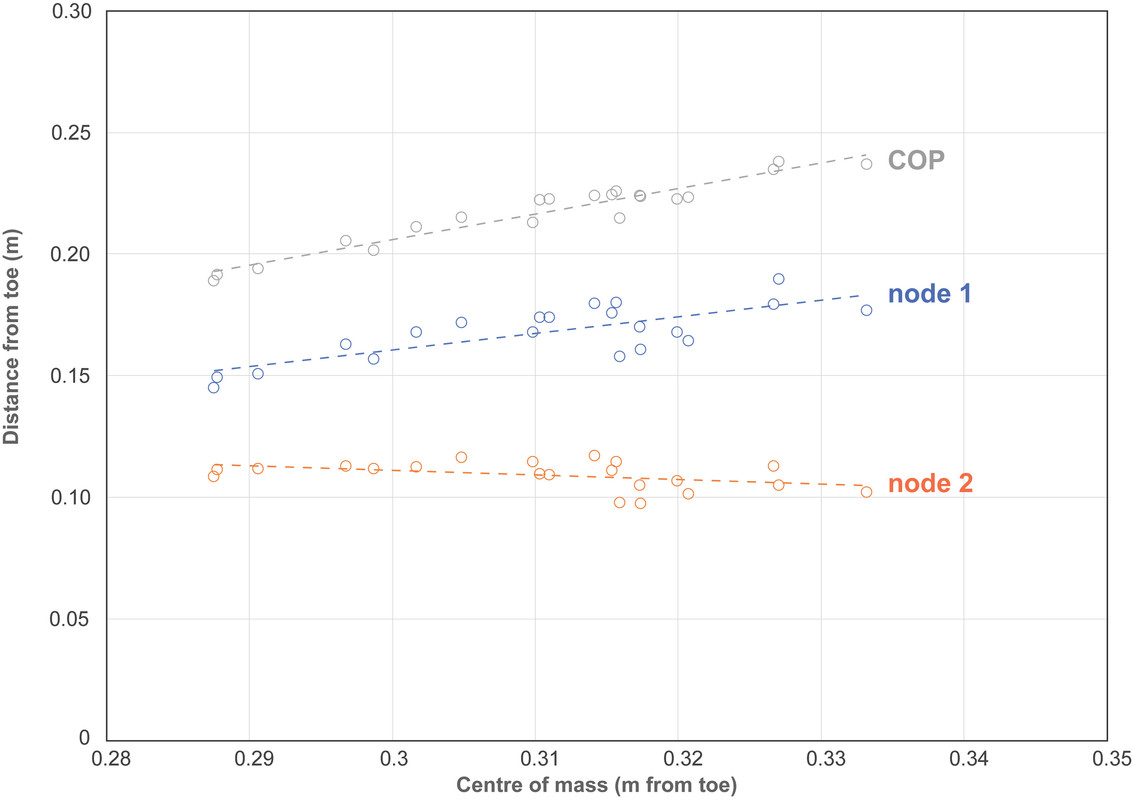
And finally, removing the definition of a sweetspot, and just showing exactly where the different points occur on the bats, again as a function of COM. There is a lot that could be read into this I suppose, but one interesting point is that the node 2 location does not change all that much, whereas the node 1 point does. Given that the amplitude of the vibration that creates node 1 is greater than node 2, then this seems like an important effect. And this is of course just a few bat designs that I measured up I am in the process of doing this properly, using the best database I could find, which is the CAD models on the B3 website I have over 100 different shapes measured and am now modelling, so I can take a proper look at the effect of duckbill V traditional toe, concaving, sweetspot position
I promise to now follow up with the bats I have actually been making, rather than just plotting graphs about them!

 Author
Topic: First home made bat - designed by artificial intelligence (Read 40581 times)
Author
Topic: First home made bat - designed by artificial intelligence (Read 40581 times)